

科力達KTS-552R15智能安卓全站儀點測量、點放樣、后方交會介紹
科力達KTS-552R15智能安卓全站儀,輕點界面,一鍵進入機載軟件測繪之星,圖形化界面,功能程序一目了然,看得懂,操作更快。

帶你全新體驗科力達智能安卓全站儀點測量、點放樣、后方交會是如何“簡單”操作,我們一起來看看。
智能安卓全站儀開機,進入工作桌面,點擊測繪之星軟件。

測繪之星主菜單
1、坐標測量
1、首先,新建工程,點擊工程進入工程列表,工程列表中會顯示儀器里所有保存的工程,以及當前使用的工程,若要新建工程(正常情況下,每換一個工程,都需要新建一個新的工程)點擊屏幕右下角的“+”圖標即可。

輸入新的工程名稱,以及作業人員或備注信息,點擊完成。

2、之后退出到測繪之星主菜單,點擊建站,選擇已知點建站。

進入已知點建站界面,點擊測站后面的“+”。

進入選擇數據來源界面,選擇調用(提前把測站坐標輸入到內存里)或者新建(直接輸入測站坐標)。

這里選擇新建,進入新建測站坐標界面,輸入測站坐標,點擊確定。

3、返回已知點建站界面,選擇定向方式:坐標后視或者方位角后視,如果是方位角后視則選擇方位角,并且輸入正確的方位角。如果是坐標后視,則選擇后視點,點擊后視點后面的“+”輸入后視點坐標。接著,輸入全站儀儀器高(從地面點中心上量取到儀器側面的橫線),再輸入棱鏡高度(后視地面點到棱鏡中心的高度)。用全站儀精確照準后視棱鏡中心,點擊“設置”。


4、接著,點擊后視檢查,點擊測量,查看輸入的后視坐標與實測后視坐標的差值:dN、dE、dZ、dSD,差值越小越好,說明精度越高。后視檢查沒有問題,返回。

點擊“測量”。


5、接著返回,點擊主菜單界面的“采集”菜單,選擇“點測量”。



6、接下來儀器瞄準前視棱鏡,點擊“測量”采集被測點的坐標,測量完成后屏幕左側N:E: Z:出現數據,接著輸入點名和前視棱鏡高,點擊“保存”,坐標數據存入儀器內存。快速測量可以直接點擊“測存”,相當于“測量+保存”。

測完一個點后,不退出界面接著測量下一個點,以此類推,直到測完本測站所有目標點。
2、放樣測量
1、返回測繪之星主菜單,建站定向方式與坐標測量一致。建站定向成功后,點擊“放樣”圖標,選擇“點放樣”。


2、進入點放樣界面,點擊“+”,選擇“輸入”輸入放樣的坐標。如果事先已經把放樣坐標導入儀器內存中,在這里可以選擇“調取”,在點庫里直接選擇放樣的坐標。


3、輸入完畢放樣坐標后,點擊“確定”,輸入棱鏡高,根據dHA顯示角度,旋轉儀器,直至dHA角度歸零“00°00"00'”,之后照準棱鏡點擊“測量”,得到棱鏡前后移動的距離,通過不斷照準棱鏡點擊“測量”,直至“dHA、前或后、填或挖”全部歸零,完成該點放樣。


3、后方交會
1、在測繪之星主菜單界面,點擊“建站”,選擇“后方交會”。

2、點擊“測量第1點”。

點擊“+”。

選擇“輸入”。

輸入第1已知點的坐標,點擊確定。

接著輸入棱鏡高,照準架設在第1點的棱鏡,點擊“測角&測距”,測完后,點擊“完成”。

3、接著點擊“測量第2點”。


點擊“+”。

選擇“輸入”。

輸入第2已知點的坐標,點擊確定。

接著輸入棱鏡高,照準架設在第1點的棱鏡,點擊“測角&測距”,測完后,點擊“完成”。

4、儀器進入后方交會初始界面,屏幕出現測量完成的第1點和第2點,如果還有第3點,可以以此類推,接著測量第3點。

5、點擊“計算”,得出測站點的坐標(殘差“dZ、 dHD越小越好”),后方交會完成。

更多相關

徠卡TS16全站儀實現自動導線測量
案例背景 導線測量是最常用的控制測量手段之一,是隧道等地下工程的主要控制測量方式。傳統的觀測手段常采用手動型全站儀進行觀測水平角,紙質記錄手簿手動記錄,現場手動核算限差,完成數據的外業采集工作。...
新《測繪法》問答片段
什么是基礎測繪?我國對基礎測繪是如何管理的? 答:基礎測繪是在我國國土進行的具有基礎性和普遍適用性的測繪活動。測繪法第十五條對基礎測繪作了規定,即建立全國統一的測繪基準和測繪系統,進行基礎航...

開放合作讓北斗更好“擁抱全球”
中國衛星導航系統管理辦公室主任冉承其22日在大會開幕式上說:“十年前,我們只有北斗一號,在軌衛星僅3顆,服務區域限于中國及周邊;十年后,我們有北斗二號、北斗三號,在軌衛星38顆,具備全球服務能力。這十...
“北斗”導航 —— 院士的人生堅守
年逾七旬仍堅守前沿攻關,中國工程院院士、某衛星導航定位總站高級工程師譚述森——用“北斗”導航人生 【事跡回放】 譚述森,中國工程院院士,現任某衛星導航定位總站高級工程師。長期從事衛星導...
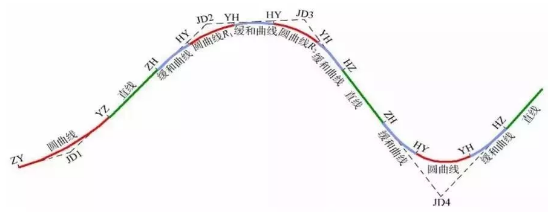
道路測量新手入門,道路平曲線概念講解
道路平曲線是什么意思呢?其實可以理解不同坡度的道路之間,用于過渡的曲線,防止坡度突然變化影響車輛的平穩,坡度變化過大且沒有平曲線的話車輛容易騰空或者掛碰車輛底盤,造成危險。所以在道路測量中就離不開...

建筑施工測量選魔星MT20i
住宅小區的成功交付,離不開完善的附屬配套工程,但是住宅小區配套工程的施工通常面臨兩項難題: 工期緊:主體工程建設周期長,可能占用配套工程工期,急...

徠卡自動化監測系統在蘇通長江公路大橋的應用
一、項目背景: 蘇通長江公路大橋,位于中國江蘇省境內,是江蘇省公路主骨架網“縱一”—贛榆至吳江高速公路的重要組成部分,是當時中國建橋史上工程規模最大、綜合建設條件最復雜的特大型橋梁工程。該橋全長...
中緯ZG20RTK主板定制,體驗更新
中緯ZG20RTK主板定制,體驗更新 當前國家經濟建設的高速發展,各工程及測繪技術人員對測量儀器如GPS-RTK的各方面要求也越來越高,產品既要精度高,又要穩定性好、還要抗干擾性強,因此GPS-...
 環球測繪微信
環球測繪微信